双5G边缘计算网关/工业CPE-AR7091G/GK
AR7091G/GK——基于5G/4G/3G/2G、WiFi、虚拟专网等技术开发的工业物联网边缘网关/CPE。产品采用高性能的工业级32位通信处理器和工业级无线模块,以嵌入式操作系统为软件支撑平台,可同时连接串口设备、以太网设备和 WiFi 设备, 支持内部Flash和外扩Micro SD卡存储数据,能满足工业现场通信的需求。

 暑期用电无忧!爱陆通输配电应用为电网安全保驾护航
暑期用电无忧!爱陆通输配电应用为电网安全保驾护航
 spi通信协议深度解析
spi通信协议深度解析
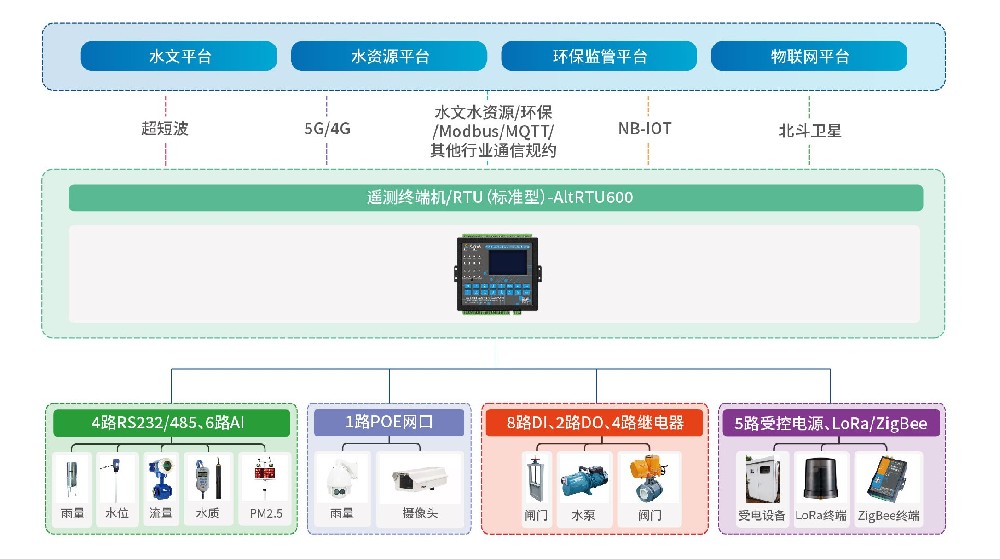
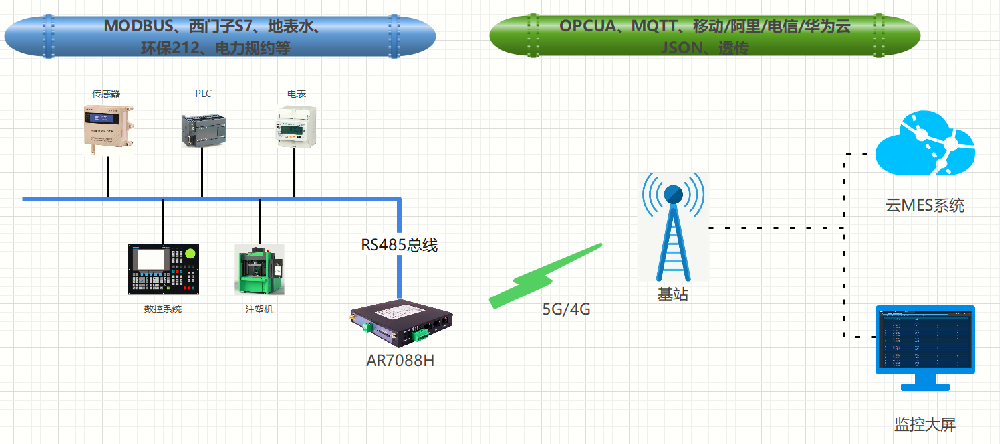
 集中式DTU通信解决方案-智能配网
集中式DTU通信解决方案-智能配网
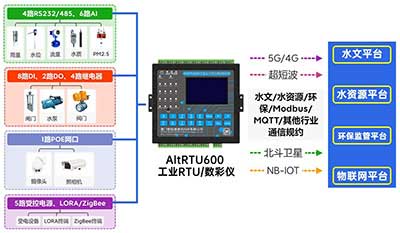 5G视频RTU 视频数采仪 数据采集传输仪
5G视频RTU 视频数采仪 数据采集传输仪
在嵌入式系统设计与开发的广阔领域中,串行通信协议扮演着至关重要的角色。其中,SPI(Serial Peripheral Interface)作为一种高效、灵活的同步串行通信接口规范,自20世纪80年代中期由摩托罗拉公司开发以来,已逐渐发展成为行业标准,广泛应用于各类微控制器(MCU)、传感器、存储器等外设之间的短距离通信。本文旨在深入探讨SPI的基本原理、工作模式、优缺点。
SPI是一种高速、全双工、同步的通信总线,其最大特点在于其简洁的硬件接口设计,通常仅需四根线(MOSI、MISO、SCLK、CS/SS)即可实现数据的双向传输。这种设计不仅极大地节省了芯片引脚资源,还使得SPI在资源受限的嵌入式系统中尤为受欢迎。SPI广泛应用于EEPROM、FLASH、ADC、DAC等芯片,以及数字信号处理器与解码器之间的通信,成为嵌入式系统内部通信的重要桥梁。
SPI通信采用主从模式,一个SPI主机可以连接一个或多个从机。主机负责初始化通信帧,通过片选线(CS/SS)选择特定的从机进行通信。在通信过程中,主机和从机通过MOSI(主设备输出/从设备输入)和MISO(主设备输入/从设备输出)两根数据线进行全双工数据传输。SCLK(串行时钟)线由主机控制,为数据传输提供同步时钟信号。
快盈iiiSPI的每个时钟周期内都会进行一次全双工数据的传输。主机通过MOSI发送数据的同时,从机通过MISO返回数据,实现了数据的即时交换。这种机制使得SPI在需要高速数据传输的场合下表现出色。
SPI通信定义了四种不同的工作模式,通过时钟极性(CPOL)和时钟相位(CPHA)两个参数来区分。CPOL决定了SCLK在空闲状态时的电平高低,而CPHA则决定了数据位相对于时钟信号的采样时刻。这四种模式为SPI设备之间的灵活配置提供了可能,但同时也要求通信双方必须工作在相同的模式下。
快盈iii模式0(CPOL=0, CPHA=0):SCLK空闲时为低电平,数据在时钟前沿被采样,后沿改变。
模式1(CPOL=0, CPHA=1):SCLK空闲时为低电平,数据在时钟后沿被采样,前沿改变。
快盈iii模式2(CPOL=1, CPHA=0):SCLK空闲时为高电平,数据在时钟前沿被采样,后沿改变。
快盈iii模式3(CPOL=1, CPHA=1):SCLK空闲时为高电平,数据在时钟后沿被采样,前沿改变。
理解并正确配置SPI的工作模式对于确保通信的顺利进行至关重要。
高速传输:SPI不受最大时钟速度限制,可以实现高速数据传输,适用于对速度要求较高的应用场景。
快盈iii接口简单:仅需四根线即可实现全双工通信,大大节省了芯片引脚资源。
低功耗:外围电路简单,上拉电阻使用少,相比I2C等协议功耗更低。
灵活性高:支持多种工作模式,便于与不同从机设备兼容。
从机无需唯一地址:简化了系统设计的复杂性。
快盈iii无带内寻址:SPI协议本身不支持设备寻址,需要通过外部逻辑(如片选线)来选择从机。
快盈iii模式切换复杂:当使用多个不同模式的从机时,主机需要频繁切换模式,影响通信效率。
快盈iii无硬件流控:只能通过软件控制来避免数据溢出或丢失。
快盈iii短距离通信:适用于板内或近距离通信,不适合长距离传输。